

【導讀】在所有的傳感器技術(shù)領(lǐng)域中,超低功耗節(jié)能設(shè)計的趨勢非常明顯。帶有無線網(wǎng)絡(luò)和故障安全保護功能的便攜式設(shè)備和傳感器尤其需要對位置數(shù)據(jù)進行低功耗測量。此外,在很多應(yīng)用中,即便外部電源不可用,也需要檢測出位置變化。
測量所需的能量可通過能量采集解決方案獲得或由電池提供。使用霍爾傳感器的磁性位置測量,可以集成到包含完整信號調(diào)理電路的單芯片編碼器中。
集成式霍爾傳感器可節(jié)省空間和節(jié)約成本,但工作期間所需的功率相對較高。這里的解決方法是讓霍爾傳感器短時啟動??焖傥恢脺y量(像電機控制所需的位置測量)需要霍爾傳感器快速評估和發(fā)送脈沖,而計量應(yīng)用程序所需要的采樣率較低。因此,節(jié)能工作需要采取特殊的解決方案。
如果實現(xiàn)微安?
霍爾傳感器生成的信號電壓與磁通密度和霍爾元件中的電流成比例。當使用CMOS技術(shù)實現(xiàn)時,傳感器的性能由工藝確定。因此,只能通過減少霍爾元件的測量周期,降低電源電壓以及使用超低功耗電路設(shè)計技術(shù)(ULP)來降低電流消耗。
測量頻率僅設(shè)置在位置測量所需的那樣高。只有在確實需要時,ULP電路設(shè)計才會啟動個別功能模塊。可編程的掉電和喚醒電路可確保避免不必要的啟動,從而將平均電流消耗降至最低。將I/O端口的供電電壓減少至3.3V或1.8V,可進一步減少電流消耗,簡化電池的選擇。
為減少外部磁場的干擾,一對霍爾傳感器可用于一體化的霍爾編碼器集成電路,適用于不同的磁場組件。磁場由在芯片上方旋轉(zhuǎn)的磁鐵生成。使用三相抽樣法時僅需要3個霍爾傳感器,而非慣用的4個傳感器,這樣可以減少約25%的電流消耗。
始終開啟
為實現(xiàn)持久的電池供電工作,集成單芯片ULP設(shè)計必須能夠完全自動開關(guān)。圖1顯示了基于iC-Haus公司iC-TW11的這種ULP架構(gòu)。這一器件是專門為電池供電的、需要高集成度節(jié)能和精確位置測量應(yīng)用而開發(fā)的。它通過SPI接口與中央微控制器(ULP設(shè)計更好)相連。只有在真的需要時,霍爾傳感器才會進行位置測量和采樣。
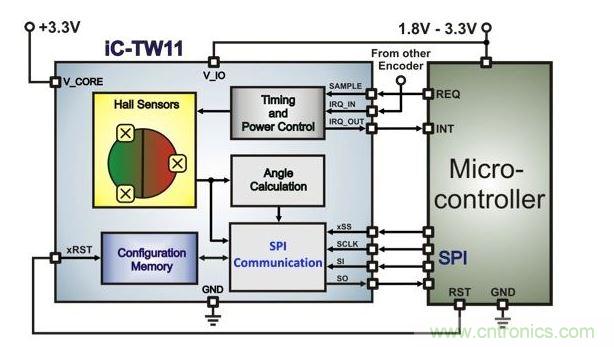
圖1:帶有微控制器的超低功耗霍爾編碼器架構(gòu)。
[page]
Hall Sensors霍爾傳感器
From other Encoder來自其他編碼器
Timing and Power Control時序和電源控制
SAMPLE采樣
Angle Calculation角度計算
Configuration Memory配置存儲器
SPI Communication SPI通信
Micro-controller微控制器
它沒有不必要的測量周期,因為這樣可能會浪費電池的電能。在完成測量和轉(zhuǎn)換后,所有不需要的電路元件將會關(guān)閉。同時,霍爾傳感器、帶控制和自動校準的下行放大器電路以及角度測量插值的采樣必須同時做到快速和節(jié)能。這樣,在10Hz采樣率和10位分辨率的情況下實現(xiàn)了低于3μA的平均電流。
在位置測量之間自動啟動待機模式中,完整單芯片霍爾編碼器的最大電流消耗僅為100nA。供電電流與所選采樣頻率的函數(shù)關(guān)系如圖2所示。連接到外部的接口工作在3.3V或1.8V電壓下。因此,與使用較低供電電壓的ULP微控制器接口時,不需要電平轉(zhuǎn)換電路。
圖2:電流消耗與采樣率的關(guān)系。
iC-TW11 Average Current Consumption iC-TW11平均電流消耗
Normal Power Mode正常功耗模式
Low Power Mode低功耗模式
Sampling Rate采樣率
對于位置測量,希望實現(xiàn)短時測量,這意味著在測量開始和結(jié)束之間的延時較短。為了使ULP微控制器在一次位置測量之后能切換到待機模式,該器件設(shè)置了喚醒微控制器的中斷輸出。如果需要多個位置值,如可移動的多軸機器人,設(shè)計時可通過一個SPI鏈路和多個中斷線路將多個iC-TW11級聯(lián)起來。由于并不總是需要有最高精度,集成濾波器功能可以關(guān)閉,以節(jié)能更多的電能。
在正常工作中,iC-TW11采樣率達到4kHz,且濾波器和自動放大器校準功能開啟,以實現(xiàn)10位分辨率的最大精度。如果關(guān)閉濾波器,延時可降低到50μs,采樣率最高可達20kHz。在采樣率相同的情況下,關(guān)閉濾波器通??蓽p少近乎90%的電流消耗??捎晌⒖刂破骰蛲ㄟ^單獨的觸發(fā)輸入(即外部事件)啟動測量周期。如果有新的位置值,微控制器通過中斷從待機模式切換至工作狀態(tài)。絕對位置數(shù)據(jù)通過時鐘速率高達16MHz的4線SPI接口讀取。由于iC-TW11和微控制器的工作時間減少,高時鐘速率也將影響到電流消耗的減少。對于測試目的或磁氣隙測量的需求,內(nèi)部原始霍爾傳感器值(10位)、正弦值和余弦值(12位)以及放大系數(shù)(18步)可選。
如果峰值電流由電容器提供,可使用能量采集解決方案(如帶無線傳感器的方案)替代電池。對于數(shù)字控制按鈕,也可以用超級電容器緩沖來應(yīng)對電源故障。
[page]
切換電源線路
在某些應(yīng)用中,即便在外部電源不可用的情況下,也需要進行高能效位置測量。對于機器人來說,在出現(xiàn)電源故障后,其由于慣性仍可繼續(xù)移動,如果未能識別到位置變化,且在錯誤數(shù)據(jù)下重啟,將會發(fā)生危險。因此,這些執(zhí)行器的所有連續(xù)移動必須通過多匝編碼器安全地檢測出。其要么有機械齒輪,要么有帶電源故障保護(如配備電池)的電子記錄功能。對于消耗量測量設(shè)備,如工業(yè)水/氣表,即便在沒有外部供電電壓的情況下,也必須能夠?qū)崿F(xiàn)采集。因此,必須能夠在電池供電和外部供電之間實現(xiàn)自動切換。
圖3顯示了使用iC-PV對葉輪進行磁掃描的氣表或水表的方框圖。這一ULP單片霍爾編碼器可在節(jié)能電池工作和正常電網(wǎng)工作之間自動切換。
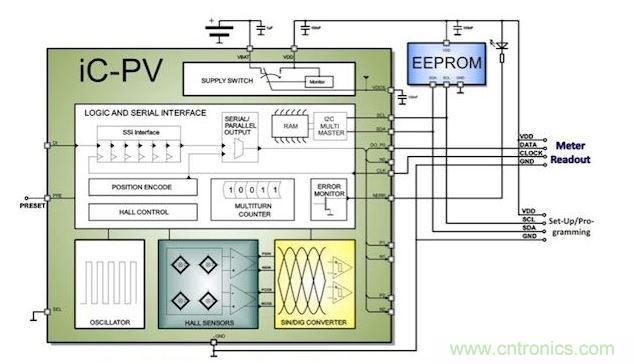
圖3:工業(yè)水/氣表計量應(yīng)用中的ULP編碼器。
Preset預(yù)置
Meter表計
Readout讀數(shù)
如果供電電壓VDD降低至低于限定電平,iC-PV將自動切換至電池供電VBAT。在電源恢復后,iC-PV通過串行接口為讀數(shù)器件提供計數(shù)值,用于消耗量計算。測量結(jié)果通過8位CRC核對,誤差通過低電平有效NERR輸出以及串行數(shù)據(jù)傳輸中的誤差位來反映。
4個霍爾傳感器以可調(diào)1至3位分辨率檢測位置變化。旋轉(zhuǎn)數(shù)在長度高達40位的多匝計數(shù)器中計數(shù)。iC-PV也具有3位八進制分辨率的并行輸出。外部EEPROM在校準期間通過單獨的I2C接口進行編程,iC-PV在上電時加載CRC所保證的配置數(shù)據(jù)。
在工作模式和待機模式下,iC-PV的ULP設(shè)計采用類似于此前描述的iC-TW11的方法來減少電流消耗。然而,iC-PV有自己獨立的周期和時序控制,以在無需使用外部微控制器的情況下,周期性地啟動規(guī)定的測量周期。根據(jù)設(shè)定的采樣率,旋轉(zhuǎn)可在12000rpm至100000rpm的速度范圍內(nèi)進行計數(shù)。平均電流消耗范圍從僅2μA至30μA,從而使電池緩沖的工作可維持數(shù)年。
總結(jié)
如兩個案例所示,使用ULP單芯片霍爾編碼器進行的位置測量,可在直接電池工作或甚至是在出現(xiàn)電源故障的情況下有效進行。在第一個案例下,測量周期通過微控制器進行外部控制和處理。在發(fā)生電源故障的案例中,單芯片霍爾編碼器iC-PV通過備份電池供電。變化能夠被檢測并保留,以至于在外部電源恢復時能夠用于發(fā)送。由于通過ULP設(shè)計技術(shù)可實現(xiàn)極低電流消耗(小于10μA)的解決方案,在單芯片編碼器中對霍爾傳感器和模擬和數(shù)字評估電路進行集成非常有利。




