

【導(dǎo)讀】由鋰離子供電的高功率密度、高能效、三相無刷直流 (BLDC) 電機可用于開發(fā)無線電動工具、真空吸塵器和電動自行車。然而,為了給更緊湊的機電產(chǎn)品節(jié)省出空間,設(shè)計人員面臨進一步縮小電機控制電子器件的壓力。
由鋰離子供電的高功率密度、高能效、三相無刷直流 (BLDC) 電機可用于開發(fā)無線電動工具、真空吸塵器和電動自行車。然而,為了給更緊湊的機電產(chǎn)品節(jié)省出空間,設(shè)計人員面臨進一步縮小電機控制電子器件的壓力。
這項任務(wù)并不簡單。除了將驅(qū)動元件壓縮到狹小空間這個顯著的難題外,還有因所有器件靠的更近而造成的熱管理問題,當(dāng)然還有電磁干擾(EMI)問題。
電機控制電路設(shè)計人員可以采用新一代高度集成的柵極驅(qū)動器來實現(xiàn)更纖薄的設(shè)計。它是電機控制系統(tǒng)最關(guān)鍵的元件。
本文將先探討 BLDC 電機的運行,然后再介紹合適的柵極驅(qū)動器以及如何使用它們來克服緊湊電機控制系統(tǒng)所面臨的設(shè)計挑戰(zhàn)。
打造更好的電機
由于在商業(yè)上面臨著能效和節(jié)省空間的雙重壓力,電機設(shè)計得到了迅猛的發(fā)展。數(shù)控 BLDC 電機代表了這一發(fā)展的一個分支。這種電機的普及要歸功于電子換向技術(shù)的應(yīng)用。在該技術(shù)的幫助下,BLDC 電機的效率要遠高于傳統(tǒng)(有刷換向)直流電機。如果兩種電機以相同速度和負載運行,BLDC 電機的效率會比傳統(tǒng)電機高 20% - 30%。
這種改進使得 BLDC 電機能夠在給定功率輸出條件下變得更小、更輕、更安靜。此外,BLDC 電機還擁有其他多種優(yōu)勢,包括更好的速度比扭矩特性、更快的動態(tài)響應(yīng)、無噪聲運行以及更高的速度范圍。與此同時,工程師們也在推動設(shè)計向著更高電壓和更高頻率發(fā)展,因為這可讓緊湊型電機完成與大型傳統(tǒng)電機同樣的功能。
BLDC 電機成功的關(guān)鍵在于其電子開關(guān)模式電源以及電機控制電路,這種電路可以產(chǎn)生一個三相輸入,進而產(chǎn)生能夠拉動電機轉(zhuǎn)子轉(zhuǎn)動的旋轉(zhuǎn)磁場。由于磁場和轉(zhuǎn)子以相同頻率旋轉(zhuǎn),因此這種電機被歸類為“同步”電機。霍爾效應(yīng)傳感器可傳達定子和轉(zhuǎn)子的相對位置,確保了控制器能夠在適當(dāng)時刻切換磁場。此外,它還采用了“無傳感器”技術(shù),通過監(jiān)控反電動勢 (EMF) 來確定定子和轉(zhuǎn)子的位置。
在三相 BLDC 電機中,依序施加電流的最常見配置是以橋式結(jié)構(gòu)排列三對功率 MOSFET。每對功率 MOSFET 均充當(dāng)逆變器,用于將來自電源的 DC 電壓轉(zhuǎn)換為驅(qū)動電機繞組所需的 AC 電壓(圖 1)。在高壓應(yīng)用中,通常使用絕緣柵雙極晶體管 (IGBT) 代替 MOSFET。
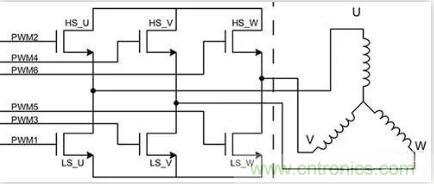
圖 1:數(shù)控三相 BLDC 電機通常使用三對 MOSFET 進行控制,一對 MOSFET 為一個電機繞組提供 AC 電壓。(圖片來源:Texas Instruments)
晶體管對包括低壓側(cè)器件(源極接地)和高壓側(cè)器件(源極在接地和高壓電源軌之間浮動)。
在典型布局中,使用脈寬調(diào)制 (PWM) 控制 MOSFET 柵極,可以有效地將輸入 DC 電壓轉(zhuǎn)換為調(diào)制驅(qū)動電壓。其中應(yīng)使用至少比預(yù)期最大電機轉(zhuǎn)速高一個數(shù)量級的 PWM 頻率。一對 MOSFET 可以控制一個電機相位的磁場。
電機控制系統(tǒng)一個完整的電機控制系統(tǒng)包括電源、主機微控制器、柵極驅(qū)動器以及采用半橋拓撲結(jié)構(gòu)的 MOSFET(圖 2)。微控制器用于設(shè)置 PWM 占空比并負責(zé)開環(huán)控制。在低壓設(shè)計中,柵極驅(qū)動器和 MOSFET 橋有時會集成在一個單元中。然而,對于高功率單元,為方便熱管理,柵極驅(qū)動器和 MOSFET 橋會分開布置,這樣可以針對柵極驅(qū)動器和橋采用不同的工藝技術(shù)并最大限度地降低 EMI。

圖 2:基于 TI MSP 430 微控制器的 BLDC 電機控制示意圖。(圖片來源:Texas Instruments)
MOSFET 橋可由分立器件或集成芯片組成。將低壓側(cè)和高壓側(cè) MOSFET 集成到同一封裝的關(guān)鍵優(yōu)勢是,即使兩個 MOSFET 存在不同的功率耗散,集成后也可以使上下 MOSFET 之間實現(xiàn)自然熱平衡。無論是集成式還是分立式,每對晶體管都需要獨立的柵極驅(qū)動器來控制開關(guān)時序和驅(qū)動電流。
此外,可以使用分立元件來設(shè)計柵極驅(qū)動器電路。這種方法的優(yōu)勢在于,工程師可以根據(jù) MOSFET 特征精確調(diào)整柵極驅(qū)動器并對性能進行優(yōu)化。不過,這種方法也存在缺點,它需要高水平的電機設(shè)計經(jīng)驗以及容納分立解決方案所需的空間。
模塊化電機控制解決方案提供了另一種選擇,市場上有各種各樣的集成式柵極驅(qū)動器。較好的模塊化柵極驅(qū)動解決方案包括:
高度集成解決方案,可最大限度地減少器件所需的空間
高驅(qū)動電流解決方案,可降低開關(guān)損耗并提高效率
高柵極驅(qū)動電壓解決方案,可確保以最小內(nèi)阻(“RDS(ON)”)導(dǎo)通 MOSFET
高水平過流、過壓和過熱保護解決方案,可確保系統(tǒng)能夠在最壞情況下可靠運行
像 Texas Instruments 的 DRV8323x 三相柵極驅(qū)動器系列之類的器件不僅能滿足高能效 BLDC 電機的要求,還能減少系統(tǒng)的元件數(shù)量,同時降低成本和復(fù)雜性。
DRV8323x 系列有三種型號。每種型號都集成了三個獨立的柵極驅(qū)動器,能夠驅(qū)動高壓側(cè)和低壓側(cè)的 MOSFET 對。柵極驅(qū)動器包含一個電荷泵,可為高壓側(cè)晶體管產(chǎn)生高柵極電壓(最高支持 100% 占空比),還包含一個線性穩(wěn)壓器,可為低壓側(cè)晶體管供電。
TI 柵極驅(qū)動器包括感應(yīng)放大器。如果需要,可以對放大器進行配置,以放大通過整個低壓側(cè) MOSFET 的電壓。這些器件可拉出最高 1 A 和灌入 2 A 的峰值柵極驅(qū)動電流,其采用單電源供電并具有 6 V 至 60 V 的超寬輸入電源范圍。
例如,DRV8323R 版驅(qū)動器集成了三個雙向電流檢測放大器,利用低壓側(cè)分流電阻器通過每個 MOSFET 橋來監(jiān)控電流水平。電流檢測放大器的增益設(shè)置可通過 SPI 或硬件接口進行調(diào)整。微控制器連接至 DRV8323R 的 EN_GATE,因此可以啟用或禁用柵極驅(qū)動輸出。
此外,DRV8323R 驅(qū)動器還集成了一個 600 mA 的降壓穩(wěn)壓器,可為外部控制器供電。該穩(wěn)壓器既可以使用柵極驅(qū)動器電源,也可以使用單獨電源(圖 3)。

圖 3:高集成度柵極驅(qū)動器(如 TI 的 DRV8323R)可以減少系統(tǒng)元件數(shù)量,降低成本和復(fù)雜性,同時節(jié)省空間。(圖片來源:Texas Instruments)
這些柵極驅(qū)動器具有多項保護功能,如電源欠壓鎖定、充電泵欠壓鎖定、過流監(jiān)控、柵極驅(qū)動器短路檢測以及過熱關(guān)斷等。
每個 DRV832x 都封裝在一個尺寸僅為 5 x 5 - 7 x 7 mm(取決于選件)的芯片中。這些產(chǎn)品可以節(jié)省 24 個以上分立元件所需的空間。
采用集成式柵極驅(qū)動器進行設(shè)計為使設(shè)計人員快速開始設(shè)計,TI 提供了參考設(shè)計 TIDA-01485。TIDA-01485 是一個效率達 99%、功率級為 1 千瓦 (kW) 的參考設(shè)計,適用于各種應(yīng)用的三相 36 伏 BLDC 電機,例如以 10 芯鋰離子電池供電的電動工具等。
該參考設(shè)計通過構(gòu)建此功率級最小的電機控制電路之一,展示了如何使用高度集成的柵極驅(qū)動器(如 DRV8323R)在電機控制設(shè)計中節(jié)省空間。該參考設(shè)計實現(xiàn)了基于傳感器的控制。
該參考設(shè)計的主要元件包括 MSP430F5132 微控制器、DRV8323R 柵極驅(qū)動器和三個 CSD88599 60 V 半橋 MOSFET 電源模塊(圖 4)。
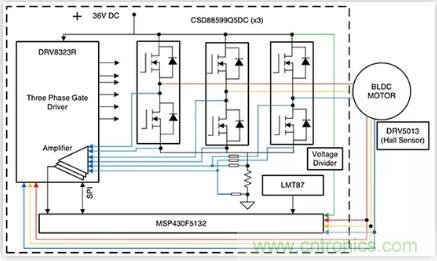
圖 4:TIDA-01485 是一個效率達 99%、功率級為 1 kW 的參考設(shè)計,適用于可由 10 芯鋰離子電池供電的三相 36 V BLDC 電機。(圖片來源:Texas Instruments)
雖然柵極驅(qū)動器是一個高度集成的模塊化解決方案,能夠消除分立設(shè)計所帶來的諸多復(fù)雜性,但仍需要做一些設(shè)計來打造能夠充分發(fā)揮其作用的系統(tǒng)。該參考設(shè)計為設(shè)計人員展示了一個全面的解決方案,可幫助其設(shè)計原型。
例如,柵極驅(qū)動器需要幾個去耦電容器才能正常運行。在參考設(shè)計中,1 微法 (μF) 電容器 (C13) 實現(xiàn)了低壓側(cè) MOSFET 驅(qū)動電壓 (DVDD) 的去耦,而該電壓來自 DRV8323R 的內(nèi)部線性穩(wěn)壓器(圖 5)。該電容器必須放置在盡可能靠近柵極驅(qū)動器的位置,才能最大限度地減小回路阻抗。此外,需要第二個 4.7 μF 電容器 (C10) 對 36 V 電池的直流電源輸入 (PVDD) 去耦。
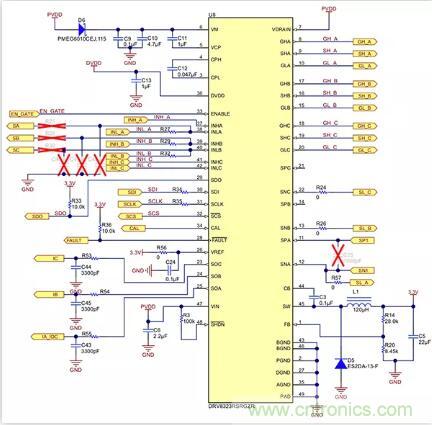
圖 5:DRV8323R 柵極驅(qū)動器應(yīng)用電路。應(yīng)盡量減少跡線長度,以限制 EMI。(圖片來源:Texas Instruments)
二極管 D6 有助于隔離柵極驅(qū)動器電源,以防在出現(xiàn)短路情況時電池電壓驟降。此二極管非常重要,因為它的存在可確保 PVDD 去耦電容器 (C10) 在短時電壓驟降情況下保持輸入電壓。
保持電壓可防止柵極驅(qū)動器進入不需要的欠壓鎖定狀態(tài)。C11 和 C12 是使電荷能夠正常運行的關(guān)鍵器件,也應(yīng)盡可能地將這兩個器件放置在靠近柵極驅(qū)動器的位置。
一般來說,好的設(shè)計思路是盡量減少高壓側(cè)和低壓側(cè)柵極驅(qū)動器的回路長度,其主要目的是減少 EMI。高壓側(cè)回路是從 DRV8323 GH_X 到功率 MOSFET,并通過 SH_X 返回。低壓側(cè)回路是從 DRV8323 GL_X 到功率 MOSFET,并通過 GND 返回。
開關(guān)時序的重要性
如何選擇 MOSFET 是關(guān)系到 BLDC 電機性能和效率的關(guān)鍵。由于沒有兩個 MOSFET 系列完全相同,因此每次選擇 MOSFET 時都取決于所需的開關(guān)時間。即使是稍微弄錯時序,也會導(dǎo)致效率低下、EMI 升高以及電機可能出現(xiàn)故障等問題。
例如,不正確的時序會引起擊穿,這種情況會造成低壓側(cè)和高壓側(cè) MOSFET 同時導(dǎo)通,進而導(dǎo)致災(zāi)難性短路。其他定時問題包括寄生電容觸發(fā)瞬變,進而可能損壞 MOSFET。此外,外部短路、焊料橋或 MOSFET 在特定狀態(tài)下掛起也會引起問題。
TI 將其 DRV8323 稱為“智能”柵極驅(qū)動器,原因是這款驅(qū)動器可以為設(shè)計人員提供時序及反饋控制,來幫助化解這些問題。例如,該驅(qū)動器包括一個內(nèi)部狀態(tài)機,可以防止柵極驅(qū)動器出現(xiàn)短路、控制 MOSFET 橋的空載時間 (IDEAD) 并防止外部功率 MOSFET 出現(xiàn)寄生導(dǎo)通。
此外,DRV8323 柵極驅(qū)動器還含有一個用于高壓側(cè)和低壓側(cè)驅(qū)動器的可調(diào)節(jié)推挽拓撲,可實現(xiàn)外部 MOSFET 橋的強力上拉和下拉,從而避免雜散電容問題。可調(diào)柵極驅(qū)動器支持改變即時柵極驅(qū)動電流 (IDRIVE) 和持續(xù)時間 (tDRIVE)(無需限流柵極驅(qū)動電阻),可對系統(tǒng)進行微調(diào)(圖 6)。
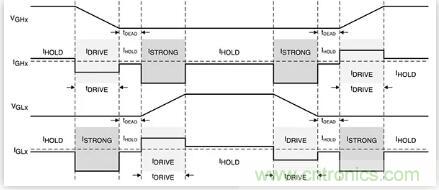
圖 6:在某個三相 BLDC 電機的 MOSFET 橋中,高壓側(cè) (VGHx) 和低壓側(cè)晶體管 (VGLx) 的電壓和電流輸入。IDRIVE 和 tDRIVE 對于電機是否正常運行及效率非常重要;IHOLD 用于將柵極維持在所需狀態(tài);ISTRONG 用于防止低壓側(cè)晶體管的柵極至源極電容出現(xiàn)導(dǎo)通。(圖片來源:Texas Instruments)
IDRIVE 和 tDRIVE 最初應(yīng)根據(jù)外部 MOSFET 的特性進行選擇,如柵極到漏極電荷、所需的上升和下降時間等。例如,如果 IDRIVE 太低,MOSFET 的上升和下降時間就會更長,從而導(dǎo)致開關(guān)損耗過高。此外,上升和下降時間還(在某種程度上)決定了每個 MOSFET 的續(xù)流二極管恢復(fù)峰值所需的能量和持續(xù)時間,這兩個因素可能會進一步降低效率。
當(dāng)更改柵極驅(qū)動器狀態(tài)時,IDRIVE 會應(yīng)用于 tDRIVE 周期,該周期必須足夠長,才能確保柵極電容完全充電或放電。根據(jù)經(jīng)驗,選擇 tDRIVE 時應(yīng)確保其大約是 MOSFET 開關(guān)上升和下降時間的兩倍。請注意,tDRIVE 不會增加 PWM 時間。如果在活動期間收到 PWM 命令,還會終止該周期。
在 tDRIVE 周期之后,一個固定保持電流 (IHOLD) 會用于將柵極維持在所需狀態(tài)(上拉或下拉)。在高壓側(cè)導(dǎo)通期間,低壓側(cè) MOSFET 柵極會受到強力下拉,以防晶體管的柵極至源極電容發(fā)生導(dǎo)通。
固定 tDRIVE 持續(xù)時間可確保在故障情況下(如 MOSFET 柵極短路),峰值電流時間受到限制。這可限制能量傳遞并防止柵極驅(qū)動引腳和晶體管受損。
結(jié)論
模塊化電機驅(qū)動器無需使用眾多分立元件,因而節(jié)省了空間,并增強了新一代緊湊型數(shù)控高功率密度 BLDC 電機的優(yōu)勢。這些“智能”柵極驅(qū)動器還含有一項技術(shù),不僅能簡化設(shè)置功率 MOSFET 開關(guān)時序的復(fù)雜開發(fā)過程,還能減輕寄生電容的影響并降低 EMI。
盡管如此,還是需要精心選擇外圍電路,如功率 MOSFET 和去耦電容器。不過如上所示,主流的電機驅(qū)動器供應(yīng)商均會提供參考設(shè)計,供開發(fā)人員設(shè)計自己的原型。




