

【導(dǎo)讀】現(xiàn)今磁感應(yīng)無線充電多只能提供低功率的充電方式,而為了縮短充電時(shí)間,該技術(shù)也逐漸往中功率發(fā)展;透過供電端與受電端的新型解調(diào)與調(diào)制技術(shù),來改善線圈傳遞控制資料的方式,可有效提高中功率磁感應(yīng)無線充電速度。
在無線充電中簡(jiǎn)單分成供電端與受電端,供電端為電力轉(zhuǎn)換成電磁波能量發(fā)送,而受電端接收其電磁波能量后,進(jìn)行電性轉(zhuǎn)換,將電力輸出到后端提供給受電裝置充電或運(yùn)行使用。
控制訊號(hào)為無線充電系統(tǒng)基礎(chǔ)
在電磁感應(yīng)式無線電力系統(tǒng)中,于受電端所需能量大小或開啟或關(guān)閉充電功能會(huì)隨受電裝置使用狀況而改變。對(duì)應(yīng)其供電端線圈上可以透過不同調(diào)節(jié)能量大小之設(shè)計(jì)進(jìn)行發(fā)送能量以進(jìn)行搭配。由于受電端與供電端并沒有實(shí)體連接,但功能上供電端又須要得知受電端狀態(tài)以從事功率調(diào)節(jié),因此為完成受電端傳送控制訊號(hào)到供電端再經(jīng)解析后進(jìn)行控制形成一個(gè)控制回路,無線通訊成為無線充電系統(tǒng)必備之功能。
電磁感應(yīng)式無線充電架構(gòu)為供電端發(fā)射電磁能量即載波訊號(hào),受電端在接收電磁能量的同時(shí),也對(duì)載波訊號(hào)進(jìn)行調(diào)制,將其編碼后的通訊資料反射到載波訊號(hào)之中,供電端再?gòu)墓╇娋€圈上載波訊號(hào)解析出通訊資料進(jìn)行控制,此技術(shù)為業(yè)界目普遍產(chǎn)品運(yùn)作原理,市面上眾多的Qi系列產(chǎn)品即使用此方式。
受電端將通訊資料調(diào)制到供電線圈上載波訊號(hào)中,最大的優(yōu)點(diǎn)在于成本,此方式毋須額外的通訊模組且在實(shí)作通訊只須從受電端傳送到供電端,是單向傳送即可完成大部分功能需求,而最大的缺點(diǎn)在于影響供電線圈上載波訊號(hào)狀態(tài),主要為受電端上負(fù)載與感應(yīng)諧振因素。
本文專門研討在無線充電供電與受電線圈之間通訊調(diào)制與解調(diào)之技術(shù),礙于篇幅有限,關(guān)于無線充電其他原理就不再詳細(xì)說明。
供電線圈的載波特性限制 頻率低/訊號(hào)高電壓不利通訊
有別于一般專門為通訊設(shè)計(jì)使用的天線,無線充電是以電力傳送為主要目標(biāo)的線圈設(shè)計(jì)后,再因功能需求在其上進(jìn)行通訊功能開發(fā)。
在電磁感應(yīng)式無線充電中供電線圈上訊號(hào)的特性為:頻率偏低并且不固定、訊號(hào)高電壓并具有電流驅(qū)動(dòng)力,而此兩種特性都不利于通訊方面的用途。
電磁感應(yīng)式所使用的頻率約在100∼300kHz之間,相對(duì)于其他通訊技術(shù)該頻率是非常低的,調(diào)制資料鮑率為求可靠,通常要遠(yuǎn)低于主載波頻率,加上本通訊技術(shù)之載波只為供電端提供頻率,受電端只能透過振幅調(diào)變(AM)進(jìn)行調(diào)制,再加上電力傳送本身功率大小是透過改變頻率方式,進(jìn)而調(diào)節(jié)線圈上諧振之振幅完成提高或降低功率輸出之功能,所以主載波頻率不固定再加上振幅變動(dòng)大的狀況下,其供電端訊號(hào)解析所須濾波器的設(shè)計(jì)變得困難。
另外,要在供電線圈上提高功率,線圈電壓須推到100V以上,且線圈上的電流具有相當(dāng)大的電流推力,才能將能量推送到受電端線圈上,因?yàn)楣╇娋€圈上增加功率后提高電壓與大電流的狀況下,受電端要在其上再調(diào)制訊號(hào)困難度也提高,在調(diào)制原理來看受電端須改變受電線圈上的阻抗進(jìn)行反射到供電線圈上影響其訊號(hào)振幅,阻抗改變?cè)酱?,反射后的振幅改變?cè)酱?,其訊?hào)也越容易辨識(shí)。
但實(shí)作上并非如此理想,為了提高功率之送電效率,供電線圈使用低阻抗導(dǎo)線與低電感量配置,在其線圈上電流驅(qū)動(dòng)力相當(dāng)強(qiáng)勁,即使受電端負(fù)載改變,依然能提供相當(dāng)?shù)挠嵦?hào)振幅以維持推力,此設(shè)定造成受電端要在載波上進(jìn)行訊號(hào)調(diào)制變得更困難,也就是光靠改變線圈上的阻抗無法有效反射到供電線圈上的載波形成明顯改變,載波振幅上的調(diào)制深度不足,其訊號(hào)解析變得困難。
再者,供電線圈上的訊號(hào)本身帶有很大雜訊,雜訊來源相當(dāng)復(fù)雜,其主要為供電端本身諧振之訊號(hào)抖動(dòng)外,還有受電端負(fù)載反應(yīng)所造成,所以反射到供電線圈調(diào)制訊號(hào)須遠(yuǎn)大于其雜訊,才有可能被解析后進(jìn)行解碼。在此說明受電端調(diào)制訊號(hào)與供電端解調(diào)訊號(hào)兩方面都有技術(shù)挑戰(zhàn)須克服,受電端須產(chǎn)生明確的調(diào)制訊號(hào);供電端也須有能力在線圈高電壓諧振訊號(hào)中取出解調(diào)方法。
中功率受電端改良方法:新型錯(cuò)動(dòng)式調(diào)制技術(shù)
前述所提要達(dá)到從受電端線圈反射通訊資料到供電線圈,須透過調(diào)制技術(shù)改變受電線圈上的阻抗方能完成,而改變調(diào)阻抗的方法在過去的常識(shí)中,為采用開關(guān)元件外加負(fù)載于調(diào)制期間加大其線圈上的負(fù)載效應(yīng)用于反射。
這樣的方式在功率加大后會(huì)遇到瓶頸,當(dāng)受電端后端負(fù)載很大的狀況下其受電線圈等效負(fù)載電阻已經(jīng)很低,若為調(diào)制訊號(hào)再加大負(fù)載其接近于將線圈短路,如此操作會(huì)增加功率損耗與易燒毀元件的問題,再者此方式調(diào)制訊號(hào)于線圈兩端同時(shí)加以負(fù)載的方式等于與供電端硬碰硬,強(qiáng)力反射到供電圈的訊號(hào)在大功率下調(diào)制深度也不容易提高。
在此提出一個(gè)改良式的調(diào)制方法,其有兩個(gè)重點(diǎn)。其一為調(diào)制訊號(hào)并非單在線圈上加重負(fù)載,調(diào)制的目標(biāo)在于線圈阻抗的改變,所以反向降低線圈阻抗也是可以達(dá)到調(diào)制之目的。其二為調(diào)制訊號(hào)并非一定要同時(shí)同線圈兩端進(jìn)行調(diào)制,可在線圈兩端進(jìn)行交替式的調(diào)制,使其受電端反射訊號(hào)到供電端線圈上的諧振進(jìn)行交替互動(dòng),避免在大功率下硬碰調(diào)制的技術(shù),可以有效加大調(diào)制深度。
參考圖1為一實(shí)作電路圖,接收線圈(Coil)感應(yīng)到電磁能量串接C1諧振電容連接到后端整流電路,其端點(diǎn)S1與S2為反相訊號(hào),實(shí)作上從整流器看S1與S2為交替拉扯電壓訊號(hào),在有負(fù)載的狀況下S1與S2波型接近于反相方波。而整流器設(shè)計(jì)為全橋式結(jié)構(gòu)與傳統(tǒng)四個(gè)二極體整流器略有些不同,其上端維持D1與D2兩個(gè)二極體當(dāng)S1與S2為高電位時(shí)將電流帶往高端,而下端有別于一般整流器改成兩個(gè)開關(guān)元件,其動(dòng)作為當(dāng)S1或S2為低電位時(shí),其連接的開關(guān)元件Q13或Q23為導(dǎo)通狀態(tài),使后端負(fù)載之接地電流可通往線圈。

圖1 受電端模組
以下整流器動(dòng)作原理舉其中一端進(jìn)行說明,兩端為對(duì)稱結(jié)構(gòu)故為反相運(yùn)作。當(dāng)S1由高電位切到低電位,反之S2會(huì)從低電位切到高電位,此時(shí)動(dòng)作應(yīng)該Q13要進(jìn)入導(dǎo)通,另外Q23要開路,在過去常識(shí)中此電路稱為半橋同步整流,Q13與Q23互相透過對(duì)相訊號(hào)進(jìn)行開關(guān)。
圖1中為改良電路能提高其切換性能,以Q12與Q22簡(jiǎn)易搭配出加速電路。以Q12來說明,當(dāng)S1為高電位時(shí)Q12會(huì)進(jìn)入導(dǎo)通而上端S12會(huì)被下拉到低電位,而R121會(huì)消耗掉一些電流,但因?yàn)樽柚荡笏該p耗不多。
當(dāng)S1準(zhǔn)備切到低電位時(shí)Q12會(huì)切到開入,此時(shí)說明一個(gè)概念,其開關(guān)電路的閘極端可視為一個(gè)電容,在切換的瞬間會(huì)有充放電時(shí)間,而采用MOSFET作為開關(guān)元件會(huì)有一個(gè)特性,便是能承受大電流與電壓,該閘極端的電容就會(huì)大,代表切換速度慢,反之速度快的元件無法承受大電流與電壓,在此舉例為一般價(jià)位的零件均接近此特性。
在圖1中Q13與Q23為高電流元件速度慢,另外搭配Q12與Q22為低電流高速元件,動(dòng)作為S1切到低電位的瞬間,Q12閘極端電壓會(huì)透過D122快速釋放Q12就會(huì)快速開路后,此時(shí)S2也將切到高電位,其S12電壓透過R121進(jìn)行充電,而S12充電后使Q13進(jìn)入導(dǎo)通,此段動(dòng)作為一連貫動(dòng)作。
另外,說明當(dāng)S2切入低電位時(shí),Q13閘極端電容之電壓會(huì)透過D121快速釋放使Q13加速進(jìn)入開路之狀況,所以此區(qū)動(dòng)作之原理為R121與R122是作為切入高電位時(shí)對(duì)閘極端充電導(dǎo)通用;而D121與D122為切入低電位時(shí),用來快速釋放閘極端電容之電壓加速開路,而Q12之動(dòng)作類似蹺蹺板用來切換方向所使用。
另外,Q131是用來暫停Q13導(dǎo)通所使用,Q131連接RX-U1進(jìn)行控制,其從U1控制輸入高電位,就以Q131導(dǎo)通效果,為使S12保持在低電位。
參考圖2其W6_3為線圈訊號(hào)、W6_2為S12即Q13之閘極端訊號(hào)、W6_1為Q131閘極端訊號(hào),當(dāng)RX-U1輸出高電位到Q131便會(huì)使該區(qū)段S12訊號(hào)維持在低電位,造成整流器在該區(qū)段不發(fā)生導(dǎo)通狀況,用意在于暫停整流動(dòng)作。

圖2 受電端線圈訊號(hào)、整流開關(guān)訊號(hào)與調(diào)制訊號(hào)
呼應(yīng)前段所述,在調(diào)制技術(shù)中改變線圈阻抗,在后端輸出有負(fù)載的狀況下透過暫停整流,即可降低受電線圈上的阻抗,但此方式須于后端有負(fù)載的狀況下才能起作用,當(dāng)后端為空載的狀況下暫停整流,并不會(huì)改變線圈上的阻抗。
所以另外要設(shè)計(jì)在空載下調(diào)制訊號(hào)的方法,加入R5、R6做為空載下的訊號(hào)調(diào)制用,其分別從線圈兩端進(jìn)行負(fù)載調(diào)制,由于是交替運(yùn)作,所以兩個(gè)電阻采用不同阻值,以對(duì)應(yīng)在不同的負(fù)載狀況下產(chǎn)生差別的調(diào)制強(qiáng)度。因此整個(gè)調(diào)制技術(shù)簡(jiǎn)單說明為當(dāng)后端為空載或輕負(fù)載時(shí),就由R5、R6擔(dān)任于調(diào)制期間加重受電線圈阻抗之工作,當(dāng)后端輸出負(fù)載加重,其阻抗小于R5、R6后,其調(diào)制作用將會(huì)喪失,所以透過暫停整流器運(yùn)作的方式,以短暫降低受電線圈上的阻抗來產(chǎn)生調(diào)制效果。
參照?qǐng)D3錯(cuò)動(dòng)式訊號(hào)圖,W7_3為受電線圈訊號(hào)、W7_1與W7_2分別為P04與P11訊號(hào)、W7_4為S1訊號(hào),其與W7_3不同在于通過一個(gè)C1電容之諧振效果后取得較強(qiáng)電流推力,其波形也會(huì)接近方波訊號(hào);W7_5與W7_6分別為S12與S22訊號(hào),從圖3中可看到設(shè)計(jì)中的調(diào)制訊號(hào)從線圈兩端分別進(jìn)行調(diào)制,并分成調(diào)制單端、解除調(diào)制、調(diào)制另一單端后再解除調(diào)制完成,此設(shè)計(jì)的用意在于對(duì)受電線圈接收電力影響最小的情況下,產(chǎn)生最大調(diào)制訊號(hào)。
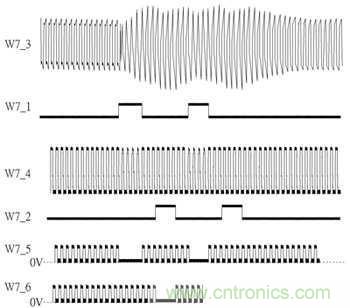
圖3 錯(cuò)動(dòng)式調(diào)制訊號(hào)圖
中功率供電端改良方法:高線圈電壓解調(diào)技術(shù)
前段所提為在受電端采行之調(diào)制方法,用意在受電端與供電端線圈感應(yīng)后,反射最大調(diào)制訊號(hào)與最不干擾電力之傳送,其訊號(hào)反射到供電線圈后在其上產(chǎn)生振幅波動(dòng)。此段所介紹的是,如何將該波動(dòng)轉(zhuǎn)換成能讓供電端主控IC進(jìn)行解碼之訊號(hào)。
參考圖4供電端模組方塊圖,此范例為在一個(gè)直流24伏特(V)供電驅(qū)動(dòng)之供電端架構(gòu),開關(guān)驅(qū)動(dòng)元件U4、U5為全橋驅(qū)動(dòng)線圈與諧振電容C1,理想狀況下線圈與C1中間應(yīng)為正弦波訊號(hào),但因?yàn)榍笮?,其線圈與電容采用低阻抗元件配置,所以于開關(guān)訊號(hào)切換瞬間為直拉型的電壓切換訊號(hào),而該訊號(hào)為非諧振成分,因此在第一道處理為去除驅(qū)動(dòng)電壓成分取出純諧振訊號(hào)。
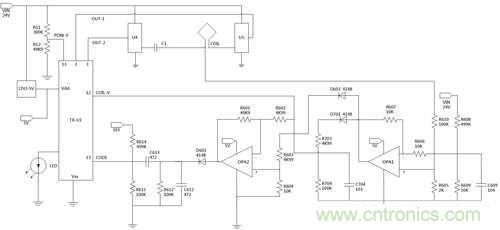
圖4 供電端模組
在圖4中由兩個(gè)運(yùn)算放大器OPA1、OPA2構(gòu)成兩個(gè)差動(dòng)放大電路,其OPA1動(dòng)作為由R608與R609進(jìn)行分壓驅(qū)動(dòng)電源作為差動(dòng)參考點(diǎn);另外,由R610與R605對(duì)線圈諧振訊號(hào)進(jìn)行分壓作為放大訊號(hào)輸入,在此有一配置為R608、R609與R610、R605之分壓比例皆為50比1,其用意在于取出與電源驅(qū)動(dòng)電壓與諧振訊號(hào)中開關(guān)電壓失真相等后,透過差動(dòng)放大出諧振訊號(hào)高于電源驅(qū)動(dòng)電之成分進(jìn)行放大。
放大后輸出分成兩路,其一為經(jīng)由D701后與R703、R704、C704構(gòu)成簡(jiǎn)單檢波電路取出訊號(hào)之有效直流電壓,參考圖5該電壓為V_dc訊號(hào)。

圖5 供電線圈訊號(hào)波峰取樣放大
另外一路由D603透過分壓電阻R603、R604后輸入到OPA2作為差動(dòng)放大輸入端,其訊號(hào)為圖5中之V_hw訊號(hào)再經(jīng)OPA2放大后輸出為V_hwa訊號(hào),D603、D701用來控制V_dc與V_hw有相同的壓降,而R603、R604、R703、R704用來設(shè)定分壓比例使得V_dc能保持在略低于V_hw之訊號(hào),確保OPA2可以只放大波峰中高低變化之部分。
OPA2輸出訊號(hào)再傳送到D601、R612、C612為一檢波電路,參考圖6中經(jīng)過D601訊號(hào)為V_env該訊號(hào)為波峰訊號(hào)之檢波結(jié)果,但該訊號(hào)之直流穩(wěn)態(tài)非固定值,所以在透過C613、R614、R615構(gòu)成之去交連耦合電路得到之波形為V_trig,而該波型最后傳到TX-U1進(jìn)行解碼處理,在圖6中能看到原供電線圈上之訊號(hào)V_coil轉(zhuǎn)換到V_trig之差異。
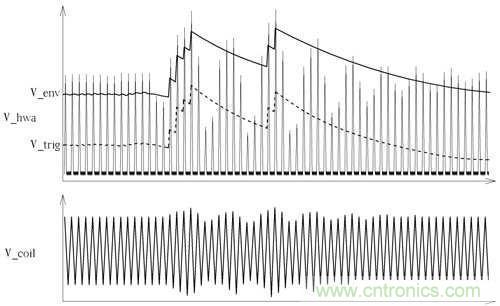
圖6 供電線圈訊號(hào)檢波與交連耦合
另外,在參考圖7中,V_coil上有間距不等的觸發(fā)訊號(hào),經(jīng)由設(shè)計(jì)解調(diào)電路V_trig解析出清楚觸發(fā)訊號(hào),而TX_U1在接收此連續(xù)觸發(fā)訊號(hào)組合進(jìn)行解碼之動(dòng)作。
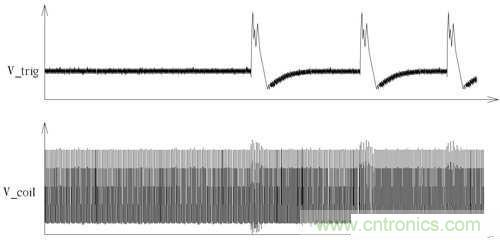
圖7 供電線圈訊號(hào)與取出觸發(fā)訊號(hào)波形
圖8中對(duì)應(yīng)從受電端調(diào)制訊號(hào)到供電端解調(diào)訊號(hào)之對(duì)應(yīng),其中能看出調(diào)制訊號(hào)時(shí)間很短,卻可在供電端上解調(diào)出相當(dāng)大與清楚之觸發(fā)訊號(hào),此為本文所介紹新型訊號(hào)調(diào)制與解調(diào)方法之目的,在最小的調(diào)制下完成最大的訊號(hào)解調(diào),此設(shè)計(jì)能有效的完成在中功率電磁感應(yīng)式無線充電中透過線圈傳遞控制資料。

圖8 受電端調(diào)制訊號(hào)對(duì)應(yīng)到供電端解調(diào)訊號(hào)



