

【導(dǎo)讀】時(shí)鐘接口閾值區(qū)間附近的抖動(dòng)會(huì)破壞ADC的時(shí)序。例如,抖動(dòng)會(huì)導(dǎo)致ADC在錯(cuò)誤的時(shí)間采樣,造成對(duì)模擬輸入的誤采樣,并且降低器件的信噪比(SNR)。降低抖動(dòng)有很多不同的方法,但是,在get降低抖動(dòng)的方法前我們必須找到抖動(dòng)的根本原因!
時(shí)鐘抖動(dòng),why?
時(shí)鐘抖動(dòng)的根本原因就是時(shí)鐘和ADC之間的電路噪聲。隨機(jī)抖動(dòng)由隨機(jī)噪聲引起,主要隨機(jī)噪聲源包括
● 熱噪聲(約翰遜或奈奎斯特噪聲),由載流子的布朗運(yùn)動(dòng)引起。
● 散粒噪聲,與流經(jīng)勢(shì)壘的直流電流有關(guān),該勢(shì)壘不連續(xù)平滑,由載流子的單獨(dú)流動(dòng)引起的電流脈沖所造成。
● 閃爍噪聲,出現(xiàn)在直流電流流動(dòng)時(shí)。該噪聲由攜帶載流子的半導(dǎo)體中的陷阱引起,這些載流子在釋放前通常會(huì)形成持續(xù)時(shí)間較短的直流電流。
● 爆裂噪聲,也稱爆米花噪聲,由硅表面的污染或晶格錯(cuò)位造成,會(huì)隨機(jī)采集或釋放載流子。
ps.以上噪聲我們?cè)鴮⒃敿?xì)講解過(guò),有興趣的筒子點(diǎn)擊藍(lán)色字體查看~
查看時(shí)鐘信號(hào)噪聲,how?
確定性抖動(dòng)由干擾引起,會(huì)通過(guò)某些方式使閾值發(fā)生偏移,通常受器件本身特性限制。查看時(shí)鐘信號(hào)噪聲通常有三種途徑:時(shí)域、頻域、相位域。
咳咳,敲黑板劃重點(diǎn),以上三種途徑的具體方法如下↓↓↓
時(shí)域圖

圖1. 抖動(dòng)的時(shí)域圖
時(shí)鐘抖動(dòng)是編碼時(shí)鐘的樣本(不同周期)間的變化,包括外部和內(nèi)部抖動(dòng)。抖動(dòng)引起的滿量程信噪比由以下公式得出

舉個(gè)栗子,頻率為1 Ghz,抖動(dòng)為100 FS均方根值時(shí),信噪比為64 dB。在時(shí)域中查看時(shí),x軸方向的編碼邊沿變化會(huì)導(dǎo)致y軸誤差,幅度取決于邊沿的上升時(shí)間??讖蕉秳?dòng)會(huì)在ADC輸出產(chǎn)生誤差,如圖2所示。抖動(dòng)可能產(chǎn)生于內(nèi)部的ADC、外部的采樣時(shí)鐘或接口電路。

圖2. 孔徑抖動(dòng)和采樣時(shí)鐘抖動(dòng)的影響
圖3顯示抖動(dòng)對(duì)信噪比的影響。圖中顯示了5條線,分別代表不同的抖動(dòng)值。x軸是滿量程模擬輸入頻率,y軸是由抖動(dòng)引起的信噪比,有別于ADC總信噪比。

圖3. 時(shí)鐘抖動(dòng)隨模擬信號(hào)增大而提升信噪比
由抖動(dòng)引起的信噪比和有效位數(shù)(ENOB)的關(guān)系由以下公式定義:
SNR = 6.02 N + 1.76 dB
其中N =有效位數(shù)。滿量程100 MHz輸入時(shí),14位有效位數(shù)要求均方根抖動(dòng)不超過(guò)0.125 ps或125 fs。該公式假定ADC具有無(wú)限分辨率,其中的唯一誤差是由時(shí)鐘抖動(dòng)產(chǎn)生的噪聲。

圖4. 由抖動(dòng)產(chǎn)生的理論信噪比和有效位數(shù)與滿量程正弦波模擬輸入頻率的關(guān)系
頻域圖
近載波噪聲出現(xiàn)在采樣時(shí)鐘中心頻率和等于信號(hào)帶寬一半的單邊帶(SSB)失調(diào)之間。寬帶噪聲的范圍從單邊帶失調(diào)到½時(shí)鐘接收器帶寬。

圖5. 頻域圖
時(shí)間的乘法運(yùn)算是在頻域中進(jìn)行卷積。因此,時(shí)鐘上在頻域上的任何“裙邊”都會(huì)施加于數(shù)字信號(hào)。這會(huì)增加信號(hào)的EVM,降低整體性能。卷積到采樣信號(hào)上的噪聲量取決于模擬頻率與采樣頻率的關(guān)系。


圖6.卷積到采樣信號(hào)上的噪聲取決于模擬頻率和采樣頻率的關(guān)系
相位域圖
相位噪聲由每個(gè)時(shí)鐘周期之間的時(shí)間變化引起。最終結(jié)果是時(shí)鐘信號(hào)在基波頻率周圍變化,這一頻率范圍變化會(huì)降低ADC的信噪比。

圖7.抖動(dòng)的相位域圖
圖8所示的例子中,−66 dBc的雜散增加到78 MHz時(shí)鐘上,用來(lái)將ADC采樣控制在30.62 MHz模擬信號(hào)。

圖8. 使用噪聲時(shí)鐘采樣時(shí)的30.62 MHz信號(hào)
雜散為−74.1 dBc,按以下公式計(jì)算:
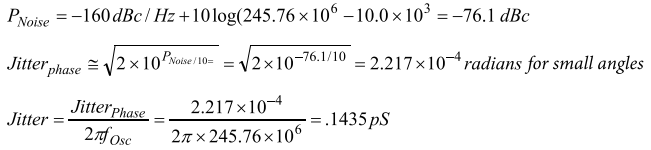
時(shí)鐘設(shè)計(jì)人員通常會(huì)提供一個(gè)相位噪聲,但不提供抖動(dòng)規(guī)格。相位噪聲規(guī)格可以轉(zhuǎn)換為抖動(dòng),首先確定時(shí)鐘噪聲,然后通過(guò)小角度計(jì)算將噪聲與主時(shí)鐘噪聲成分進(jìn)行比較。相位噪聲功率通過(guò)計(jì)算圖9中的灰色區(qū)域積分得出。

圖9. 對(duì)編碼帶寬的近載波到時(shí)鐘輸出噪聲進(jìn)行積分計(jì)算
高度為−160 dBc,寬度為10 KHz至245.76 MHz。因此,
10×log(245.7e6 − 10e3)
= 83.9 dB,−160 + 83.9 dB
= 76.1 dBc
得出積分噪聲。
載波的失調(diào)不同,噪聲的斜率也不同。例如,A1區(qū)域通常為1/f噪聲,而A4區(qū)域則視為寬帶噪聲。

圖10.在頻率范圍內(nèi)的噪聲變化情況
A =面積=積分相位噪聲功率(dBc)抖動(dòng)可以通過(guò)對(duì)編碼帶寬的近載波到時(shí)鐘輸出的噪聲進(jìn)行積分計(jì)算確定。頻率范圍應(yīng)分為較小的頻帶,然后相加得到總的結(jié)果:A = 10 log10 (A1 + A2 + A3 + A4)
本文轉(zhuǎn)載自ADI.
推薦閱讀:


