

【導(dǎo)讀】一般來說,機(jī)器手有兩種普遍的設(shè)計(jì)流派。第一種是以完成某項(xiàng)工作為導(dǎo)向的簡(jiǎn)單明了的高效機(jī)器手,依靠?jī)扇甘种浮梗ㄋ纬傻你Q子)輕而易舉的完成許多工作。第二種是完全按照人類雙手進(jìn)行精確模擬——擁有一根拇指的其他四根手指的設(shè)計(jì),基于人類數(shù)百萬年進(jìn)化而成的雙手去設(shè)計(jì)機(jī)器手,因?yàn)槲覀兩磉吽械奈矬w都是根據(jù)我們的雙手去設(shè)計(jì)的,所以如果希望機(jī)器人能夠盡可能做到更多事情,最好是擁有一雙像真人一樣的手。
鑒于真實(shí)人手內(nèi)在的復(fù)雜性,在設(shè)計(jì)擬人仿生手時(shí)不可避免的采取了許多折中方案,讓它們正常工作的同時(shí)還保持了人手的外形。來自西雅圖華盛頓大學(xué)的ZheXu和EmanuelTodorov開創(chuàng)性的開發(fā)了一款有史以來最精細(xì)且運(yùn)動(dòng)最準(zhǔn)確的擬人仿生手,它的終極目標(biāo)是完全取代人類雙手。
關(guān)于設(shè)計(jì)一種新的機(jī)器手對(duì)他們的重要性,Xu表示:
「擬人機(jī)器手設(shè)計(jì)的常規(guī)方法是,用類似鉸鏈、聯(lián)動(dòng)裝置和平衡環(huán)等零件來實(shí)現(xiàn)生物部件的機(jī)械化,從而將看似復(fù)雜的人體參照物進(jìn)行了簡(jiǎn)化。這種方法對(duì)于理解并模仿人手的運(yùn)動(dòng)原理有一定幫助,但不可避免的制造了一些人與機(jī)械手之間的不良差異,因?yàn)槿耸稚洗蠖鄶?shù)顯著的生物力學(xué)特征都在機(jī)械化的過程中被丟棄了。這些機(jī)器手和人手生物力學(xué)在本質(zhì)上的不匹配阻礙了我們使用自然的手部運(yùn)動(dòng)來直接控制它們。因此,還沒有任何一只擬人機(jī)器人手可以達(dá)到人手的靈巧程度。」
Xu和Todorov決定從零開始他們的機(jī)器手項(xiàng)目,以盡可能精確的方式機(jī)械的復(fù)制人手。首先,他們通過激光掃描出了人手的骨骼,然后通過3D打印出匹配的人工骨骼,使他們能夠復(fù)制出我們?nèi)耸炙鶕碛械撵`活的連接關(guān)節(jié)。
「例如,我們對(duì)生拇指的運(yùn)動(dòng)依靠于腕掌關(guān)節(jié)(CMC)中梯形骨的復(fù)雜形狀。由于梯形骨的不規(guī)則形狀,CMC關(guān)節(jié)軸沒有固定的精準(zhǔn)位置。所以說,目前所有的擬人機(jī)器手都是采用傳統(tǒng)的機(jī)械連接,這種連接方式固定的旋轉(zhuǎn)軸。因此,這些傳統(tǒng)的機(jī)器手都無法還原自然的拇指運(yùn)動(dòng)。我們通過掃描尸體手骨架,3D打印了人工骨骼,并且該人工手指關(guān)節(jié)的運(yùn)動(dòng)范圍、剛度、和動(dòng)態(tài)行為都非常接近人手。我們的機(jī)器手設(shè)計(jì)獨(dú)一無二的保留了重要的人手生物力學(xué)信息,達(dá)到了解剖級(jí)別。」
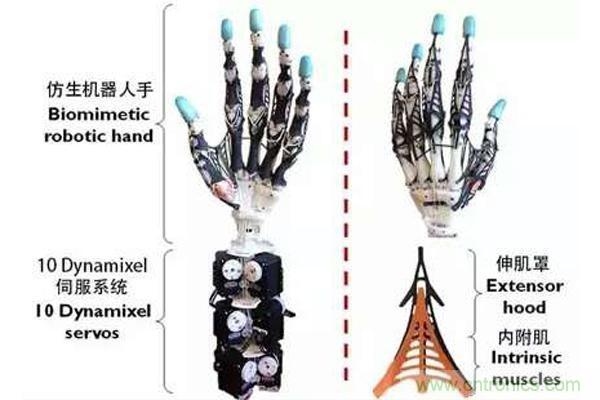
關(guān)節(jié)韌帶(身體用來固定關(guān)節(jié)且控制它們活動(dòng)范圍的部分)的材料使用了高強(qiáng)度的Spectra帶,并帶有激光切割的橡膠板來代替增加關(guān)節(jié)依從性的軟組織。伸肌和屈肌的肌腱(用來矯直和彎曲手指的部分)也由Spectra帶構(gòu)成,同時(shí)用更多的激光切割橡膠板代替了腱鞘和伸肌腱帽,后者是通過包裹手指來使其應(yīng)對(duì)靈活性和扭矩的復(fù)雜的蹼狀多層結(jié)構(gòu)。UW(華盛頓大學(xué)縮寫)手的最后一部分構(gòu)成是肌肉,它是由一排10個(gè)Dynamixel伺服系統(tǒng)組成,它們的電纜布線也緊密的模仿了人手的腕隧道。
除去工藝絕倫之外,我們還可以通過waldo遙控器去操縱UW手準(zhǔn)確的模仿人手的各種抓拿動(dòng)作。研究人員認(rèn)為,因?yàn)樗麄兊臋C(jī)器人動(dòng)力學(xué)非常接近真實(shí)的人手,因此,用戶可以在沒有任何力反饋的情況下用手進(jìn)行復(fù)雜的操作。用戶也可以在研究人員歸因于與人手運(yùn)動(dòng)學(xué)高度匹配的機(jī)器手上,在零力回饋的情況下用手進(jìn)行復(fù)雜的操作。
真正的關(guān)鍵在于:擬人機(jī)器手完全按照模擬人手來設(shè)計(jì),這意味著它可以模擬人手的動(dòng)作,這主要取決于它的構(gòu)造,而非一種電腦編程。在遙控操作方面,它也有很多潛在優(yōu)勢(shì),因?yàn)椴僮髡呖梢愿訜o縫的利用自己雙手的靈活性。

更有趣的是,研究人員認(rèn)為他們所研究的機(jī)器手可以用來「為肢體再生的研究做3D支架」。Xu解釋說:
「對(duì)義肢假手的控制主要依賴于人的大腦。因此,如果義肢的設(shè)計(jì)更加接近于生物本體,那同樣的神經(jīng)義肢技術(shù)就會(huì)更加有效。生物相容性材料現(xiàn)在已經(jīng)可以被打印成骨架,可生物降解的人造韌帶也可以被用來取代撕裂的前交叉韌帶,人類肌肉已經(jīng)成功地在培養(yǎng)皿內(nèi)被培育出來,而且外周神經(jīng)在合適的條件下也可以再生。所有這些有前途的新技術(shù)都需要適合移植細(xì)胞生長的支架。我們將與生物學(xué)和組織工程學(xué)的研究人員合作,進(jìn)一步探索仿生機(jī)器手在神經(jīng)義肢和肢體再生等新興領(lǐng)域作為生物制造設(shè)備/支架的潛力。」
華盛頓大學(xué)的XuZhe和EmanuelTodorov的「高仿生擬人機(jī)器手對(duì)假肢再生的設(shè)計(jì)」將于五月份在斯德哥爾摩五月份的ICRA(IEEEInternationalConferenceonRoboticsandAutomation)會(huì)議上呈現(xiàn)。
XuZhe目前是耶魯大學(xué)GRAB實(shí)驗(yàn)室的博士后。



