

【導(dǎo)讀】當(dāng)前許多精密模數(shù)轉(zhuǎn)換器(ADC)具有串行外設(shè)接口(SPI)或某種串行接口,用以與包括微控制器單元(MCU)、DSP和FPGA在內(nèi)的控制器進(jìn)行通信??刂破鲗?xiě)入或讀取ADC內(nèi)部寄存器并讀取轉(zhuǎn)換碼。SPI的印刷電路板(PCB)布線簡(jiǎn)單,并且有比并行接口更快的時(shí)鐘速率,因而越來(lái)越受歡迎。而且,使用標(biāo)準(zhǔn)SPI很容易將ADC連接到控制器。
一些新型ADC具有SPI,但有些ADC具有非標(biāo)準(zhǔn)的3線或4線SPI作為從機(jī),因?yàn)樗鼈兿M麑?shí)現(xiàn)更快的吞吐速率。例如,AD7616, AD7606 和 AD7606B系列有兩條或四條SDO線,在串行模式下可提供更快的吞吐速率。AD7768, AD7779和AD7134系列有多條SDO線,用作SPI主機(jī)。用戶(hù)在設(shè)計(jì)微控制器SPI以配置ADC和讀取代碼時(shí)往往會(huì)遇到困難。
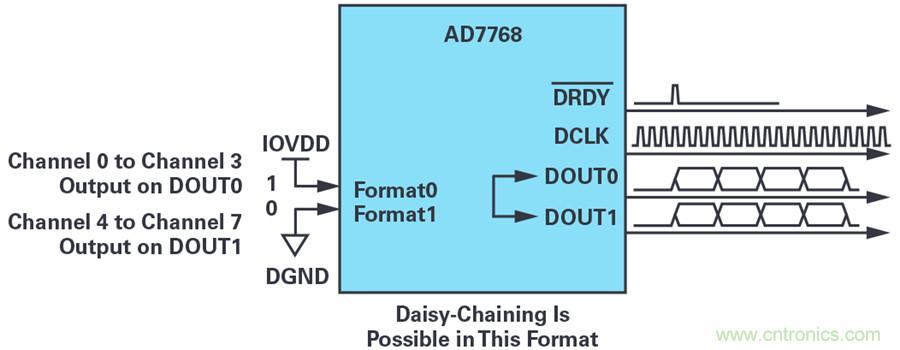
圖1. AD7768用作串行主機(jī),具有兩個(gè)數(shù)據(jù)輸出引腳(14001-193)。
與ADC的標(biāo)準(zhǔn)MCU SPI連接
SPI是一種同步、全雙工、主從式接口。來(lái)自主機(jī)或從機(jī)的數(shù)據(jù)在時(shí)鐘上升沿或下降沿同步。主機(jī)和從機(jī)可以同時(shí)傳輸數(shù)據(jù)。圖2顯示了典型的4線MCU SPI接口連接。
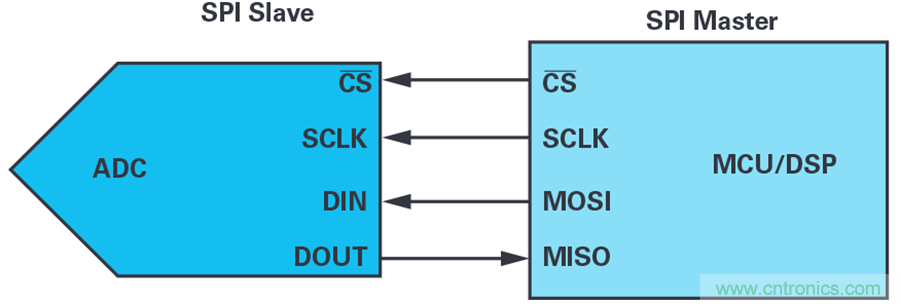
圖2. 與ADC從機(jī)的標(biāo)準(zhǔn)MCU SPI連接。
要開(kāi)始SPI通信,控制器必須發(fā)送時(shí)鐘信號(hào),并通過(guò)使能 CS 信號(hào)(通常是低電平有效信號(hào))來(lái)選擇ADC。SPI是全雙工接口,因此控制器和ADC可以分別通過(guò)MOSI/DIN和MISO/DOUT線同時(shí)輸出數(shù)據(jù)??刂破鱏PI接口允許用戶(hù)靈活選擇時(shí)鐘的上升沿或下降沿來(lái)采樣和/或移位數(shù)據(jù)。為了在主機(jī)和從機(jī)之間進(jìn)行可靠的通信,用戶(hù)必須遵守微控制器和ADC芯片的數(shù)字接口時(shí)序規(guī)范。

圖3. SPI數(shù)據(jù)時(shí)鐘時(shí)序圖示例。
如果微控制器SPI和ADC串行接口具有標(biāo)準(zhǔn)SPI時(shí)序模式,那么用戶(hù)設(shè)計(jì)PCB布線和開(kāi)發(fā)驅(qū)動(dòng)器固件不成問(wèn)題。
但是,有些新型ADC的串行接口端口不是典型的SPI時(shí)序模式。MCU或DSP似乎不可能通過(guò)AD7768串行端口(一種非標(biāo)準(zhǔn)時(shí)序SPI端口)讀取數(shù)據(jù),如圖4所示。

圖4. AD7768 FORMATx = 1×時(shí)序圖,僅通過(guò)DOUT0輸出。
與STM32F429 SPI連接
如何操縱標(biāo)準(zhǔn)微控制器SPI以便與具有非標(biāo)準(zhǔn)SPI端口的ADC接口讀取數(shù)據(jù)呢?以STM32F429微控制器讀取AD7768數(shù)據(jù)為例。如圖4所示,當(dāng)FORMATx = 11或10時(shí),通道0至通道7僅通過(guò)DOUT0輸出 數(shù)據(jù)。在標(biāo)準(zhǔn)工作模式下, AD7768/AD7768-4 作為主機(jī)工作,數(shù)據(jù)流入MCU、DSP或FPGA。AD7768/AD7768-4向從機(jī)提供數(shù)據(jù)、數(shù)據(jù)時(shí)鐘(DCLK)和下降沿幀使能信號(hào)(DRDY)。
STM32Fxxx系列微控制器廣泛用于很多不同的應(yīng)用中。該MCU有多個(gè)SPI端口,可以使用典型的SPI時(shí)序模式將其配置為SPI主機(jī)或從機(jī)。
AD7768/AD7768-4分別為8通道和4通道同步采樣∑-?型ADC,每通道均有∑-?型調(diào)制器和數(shù)字濾波器,支持交流和直流信號(hào)的同步采樣。這些器件在110.8 kHz的最大輸入帶寬下實(shí)現(xiàn)了108 dB動(dòng)態(tài)范圍,具備±2 ppm INL、±50 µV偏置誤差和±30 ppm增益誤差的典型性能。AD7768/AD7768-4用戶(hù)可在輸入帶寬、輸出數(shù)據(jù)速率和功耗之間進(jìn)行權(quán)衡,并選擇三種功耗模式之一以?xún)?yōu)化噪聲目標(biāo)和功耗。AD7768/AD7768-4的靈活性使其成為適合低功耗直流和高性能交流測(cè)量模塊的可重復(fù)使用平臺(tái)。
遺憾的是,AD7768的串行接口不是典型SPI時(shí)序模式,而且AD7768充當(dāng)串行接口主機(jī)。一般而言,用戶(hù)必須使用FPGA/CPLD作為其控制器,例如,使用32F429IDISCOVERY和AD7768評(píng)估板。變通SPI線的連接如圖5所示。在這種設(shè)置下,AD7768的所有八通道數(shù)據(jù)僅通過(guò)DOUT0輸出。
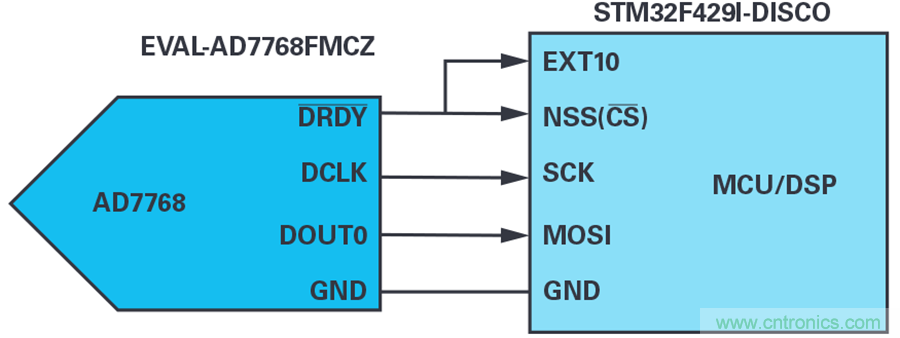
圖5. AD7768通過(guò)DOUT0將數(shù)據(jù)輸出到STM32F429 MCU SPI連接。
需要解決的問(wèn)題:
● AD7768用作SPI主機(jī),故必須將STM32F429I SPI配置為SPI從機(jī)。
● DRDY 高電平脈沖只持續(xù)一個(gè)DCLK周期,這不是典型的CS。
● 完成所有通道數(shù)據(jù)位的輸出之后,DCLK繼續(xù)輸出,DRDY為低電平。
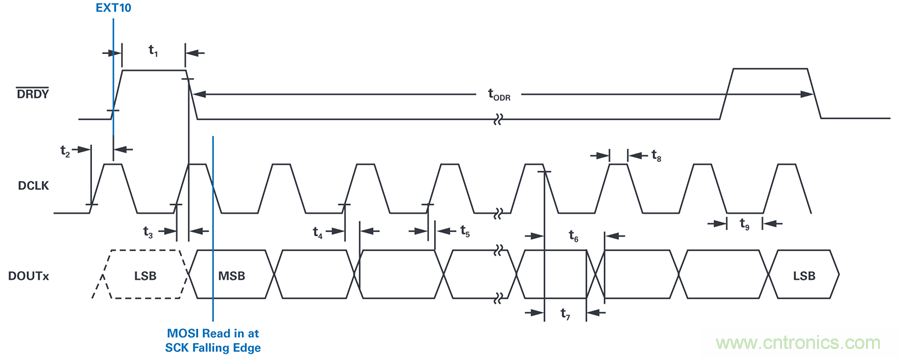
圖6. 時(shí)序解決方案中的AD7768數(shù)據(jù)位讀取。
解決方案:MCU SPI作為從機(jī),通過(guò)一條DOUT線與SPI主機(jī)ADC接口。
● 將STM32F429的一個(gè)SPI端口(如SPI4)配置為從機(jī),以DCLK速率接收MOSI上的數(shù)據(jù)位。
● 將AD7768DRDY 連接到STM32F429外部中斷輸入引腳EXTI0和NSS (SPI CS) 引腳。 DRDY 的上升沿將觸發(fā)EXTI0處理例程,以使SPI從機(jī)能夠在DRDY 變?yōu)榈碗娖街蟮牡谝粋€(gè)DCLK下降沿開(kāi)始接收數(shù)據(jù)位。時(shí)序設(shè)計(jì)在這里至關(guān)重要。
● 接收到通道0至通道7的所有數(shù)據(jù)后,應(yīng)禁用SPI以防止讀取額外的無(wú)效數(shù)據(jù),因?yàn)?DRDY 會(huì)使SPI從機(jī) CS 變?yōu)榈碗娖?,并且DCLK保持切換。
MCU固件開(kāi)發(fā)注意事項(xiàng)
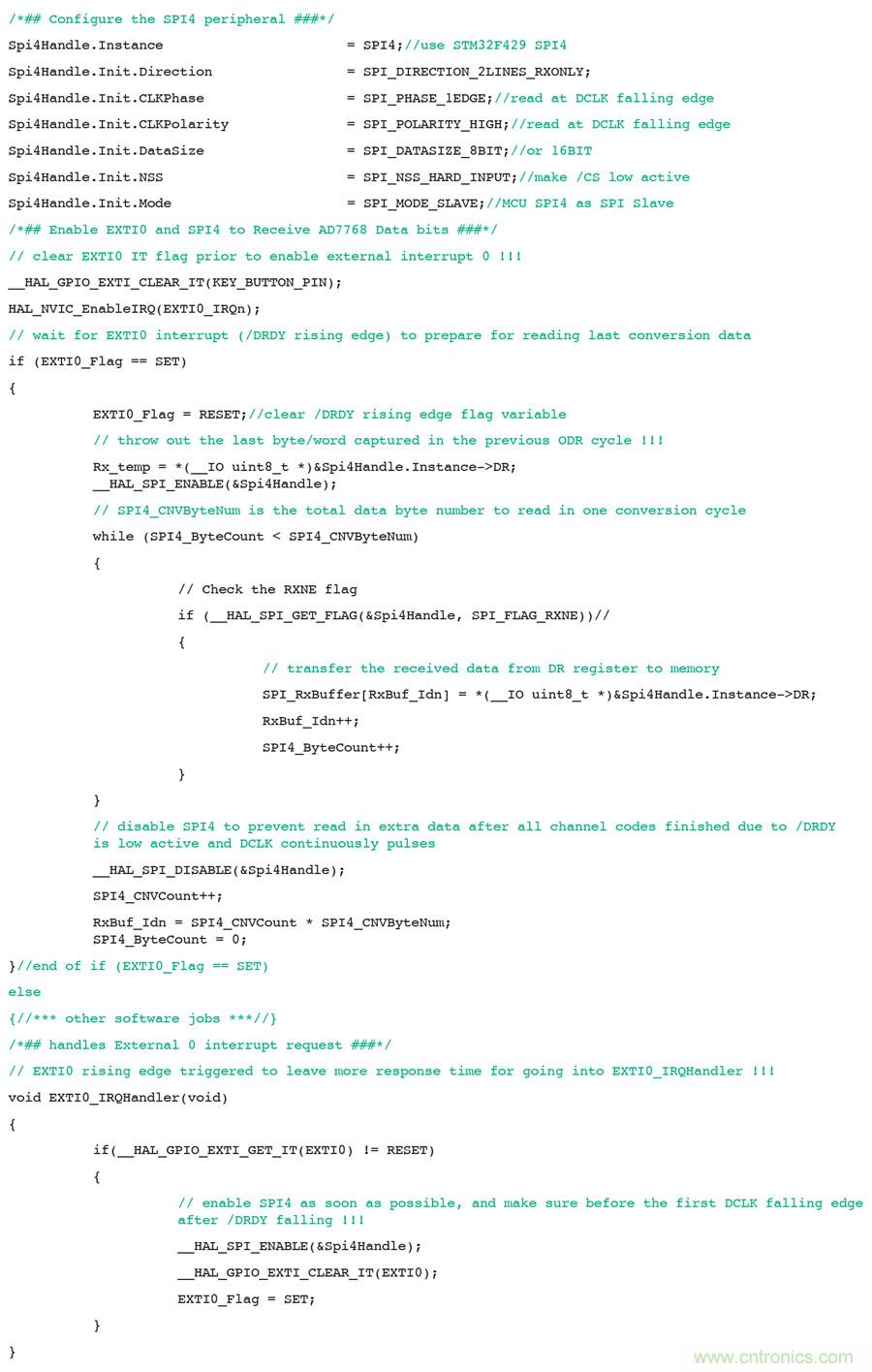
圖7. 配SPI4外設(shè)。
當(dāng)軟件處于中斷模式時(shí),DCLK運(yùn)行速率可以高達(dá)4 MHz,實(shí)現(xiàn)8 kSPS的 ODR。軟件應(yīng)進(jìn)入中斷處理程序,在一個(gè)半DCLK周期(375 ns)內(nèi)啟動(dòng)SPI。為使軟件更輕松地進(jìn)入中斷例程,MCU可以在DCLK上升沿讀取數(shù)據(jù),從而提供額外的半個(gè)DCLK周期時(shí)間。但是, t5 DCLK上升到DOUTx無(wú)效最小值為–3 ns(IOVDD = 1.8 V時(shí)為–4 ns),因此DOUTx上的傳播延遲(>|t5| + MCU 保持時(shí)間) 應(yīng)通過(guò)PCB布線或緩沖增加。
推薦閱讀:



