

【導(dǎo)讀】鑒于反饋通路中相移(或者稱作延遲)引起的諸多問(wèn)題,我們一直在追求運(yùn)算放大器的穩(wěn)定性。通過(guò)上周的討論我們知道,電容性負(fù)載穩(wěn)定性是一個(gè)棘手的問(wèn)題。
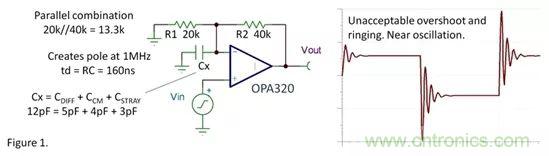
如果受反饋網(wǎng)絡(luò)電阻影響的運(yùn)算放大器輸入電容(加上一些雜散電容)形成的相移或者延遲過(guò)大,則簡(jiǎn)易非反相放大器便會(huì)不穩(wěn)定,或者出現(xiàn)大量過(guò)沖和振鈴。您可以通過(guò)減少該節(jié)點(diǎn)的雜散電容來(lái)獲得一定的改善,其可以最小化這種連接的電路板線路面積。使用某個(gè)特定的運(yùn)算放大器時(shí),輸入電容(差分電容+共模電容)為固定值—您會(huì)受到它的束縛。
但是,您可以按比例減小反饋網(wǎng)絡(luò)的電阻值,以保持增益不變。這樣可將該電容所產(chǎn)生的極點(diǎn)頻率移至更高頻率,并減小延遲時(shí)間常量。本例中,我們將電阻減小至 5kΩ 和 10kΩ,獲得了明顯改善,但仍然產(chǎn)生了約 10% 過(guò)沖,并有振鈴出現(xiàn)。
另外,它還給運(yùn)算放大器帶來(lái)額外的負(fù)載,因此您不能過(guò)多地使用這種解決方法。兩個(gè)電阻器的和為運(yùn)算放大器負(fù)載,因此您可能不希望其太低。
更理想的解決方案可能是一個(gè)與 R2 并聯(lián)的電容器 Cc(請(qǐng)參見(jiàn)圖 2)。當(dāng) R1?Cx= R2?Cc 時(shí),分壓器獲得補(bǔ)償,并且所有頻率的阻抗比均恒定不變。這樣,反饋網(wǎng)絡(luò)中便沒(méi)有相移或者延遲。:)

您可以把這種反饋網(wǎng)絡(luò)比作 10x 示波器探針的補(bǔ)償衰減器(請(qǐng)參見(jiàn)圖 3),其概念是一樣的。探針中的可變電容器允許進(jìn)行調(diào)節(jié),以讓兩個(gè)時(shí)間常量相等。請(qǐng)注意,這種示波器探針的響應(yīng)從未表現(xiàn)出不穩(wěn)定,即使錯(cuò)誤調(diào)節(jié)時(shí)也是如此。為什么呢?原因是它并沒(méi)有在反饋環(huán)路內(nèi)部。
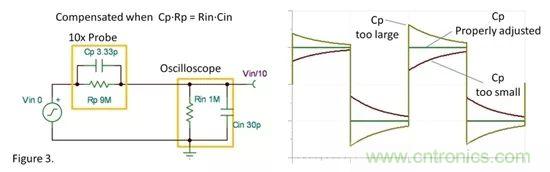
正如讓其中一個(gè)電容器在示波器探針中可調(diào)節(jié)來(lái)對(duì)補(bǔ)償進(jìn)行微調(diào)一樣,您也需要對(duì)圖 2 所示 Cc 的值進(jìn)行調(diào)節(jié)。由于雜散電容存在不確定的影響,因此我們可能無(wú)法知道電容 Cx 的準(zhǔn)確大小。
另外,您可能希望微調(diào)電路的響應(yīng)來(lái)達(dá)到您的要求。這樣做可能會(huì)產(chǎn)生一些過(guò)沖,但卻可以獲得更高的速度和更佳的帶寬。
之前,我介紹了不穩(wěn)定性的另一種常見(jiàn)情況,即電容性負(fù)載運(yùn)算放大器?,F(xiàn)在,這種解決方案又在環(huán)路中產(chǎn)生了相移(反饋延遲),而其為問(wèn)題的根源。這一次的情況很復(fù)雜,因?yàn)殚_(kāi)環(huán)輸出電阻在運(yùn)算放大器內(nèi)部。
我們無(wú)法穿過(guò)該電阻器連接一個(gè)補(bǔ)償電容器。實(shí)際上,它并非為一個(gè)真正的電阻器,它是運(yùn)算放大器電路的一個(gè)“等效”輸出電阻。因此,下次,我們將討論電容性負(fù)載問(wèn)題。
推薦閱讀:





