

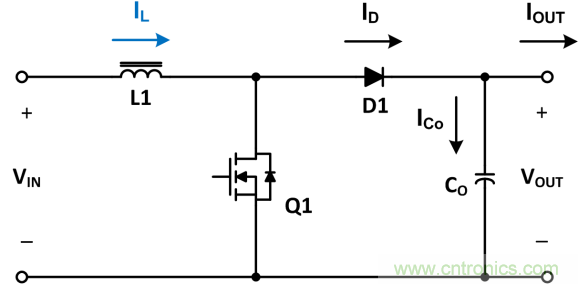
【導(dǎo)讀】升壓拓?fù)浣Y(jié)構(gòu)在功率電子領(lǐng)域非常重要,但是電感值的選擇并不總是像通常假設(shè)的那樣簡(jiǎn)單。在dc - dc升壓轉(zhuǎn)換器中,所選電感值會(huì)影響輸入電流紋波、輸出電容大小和瞬態(tài)響應(yīng)。選擇正確的電感值有助于優(yōu)化轉(zhuǎn)換器尺寸與成本,并確保在所需的導(dǎo)通模式下工作。
本文講述的是在一定范圍的輸入電壓下,計(jì)算電感值以維持所需紋波電流和所選導(dǎo)通模式的方法,并介紹了一種用于計(jì)算輸入電壓上限和下限模式邊界的數(shù)學(xué)方法,還探討了如何使用安森美半導(dǎo)體的WebDesigner?在線設(shè)計(jì)工具來(lái)加速這些設(shè)計(jì)步驟。
Conduction Mode
導(dǎo)通模式
升壓轉(zhuǎn)換器的導(dǎo)通模式由相對(duì)于直流輸入電流(IIN)的電感紋波電流峰峰值(ΔIL)的大小決定。這個(gè)比率可定義為電感紋波系數(shù)(KRF)。電感越高,紋波電流和KRF就越低。

在連續(xù)導(dǎo)通模式(CCM)中,正常開關(guān)周期內(nèi),瞬時(shí)電感電流不會(huì)達(dá)到零(圖1)。因此,當(dāng)ΔIL小于IIN的2倍或KRF <2時(shí),CCM維持不變。MOSFET或二極管必須以CCM導(dǎo)通。這種模式通常適用于中等功率和高功率轉(zhuǎn)換器,以最大限度地降低元件中電流的峰值和均方根值。當(dāng)KRF > 2且每個(gè)開關(guān)周期內(nèi)都允許電感電流衰減到零時(shí),會(huì)出現(xiàn)非連續(xù)導(dǎo)通模式(DCM)(圖2)。直到下一個(gè)開關(guān)周期開始前,電感電流保持為零,二極管和MOSFET都不導(dǎo)通。這一非導(dǎo)通時(shí)間即稱為tidle。DCM可提供更低的電感值,并避免輸出二極管反向恢復(fù)損耗。

當(dāng)KRF = 2時(shí),轉(zhuǎn)換器被認(rèn)為處于臨界導(dǎo)通模式(CrCM)或邊界導(dǎo)通模式(BCM)。在這種模式下,電感電流在周期結(jié)束時(shí)達(dá)到零,正如MOSFET會(huì)在下一周期開始時(shí)導(dǎo)通。對(duì)于需要一定范圍輸入電壓(VIN)的應(yīng)用,固定頻率轉(zhuǎn)換器通常在設(shè)計(jì)上能夠在最大負(fù)載的情況下在指定VIN范圍內(nèi),以所需要的單一導(dǎo)通模式(CCM或DCM)工作。隨著負(fù)載減少,CCM轉(zhuǎn)換器最終將進(jìn)入DCM工作。在給定VIN下,使導(dǎo)通模式發(fā)生變化的負(fù)載就是臨界負(fù)載(ICRIT)。在給定VIN下,引發(fā)CrCM / BCM的電感值被稱為臨界電感(LCRIT),通常發(fā)生于最大負(fù)載的情況下。
紋波電流與VIN
眾所周知,當(dāng)輸入電壓為輸出電壓(VOUT)的一半時(shí),即占空比(D)為50%時(shí)(圖3),在連續(xù)導(dǎo)通模式下以固定輸出電壓工作的DC-DC升壓轉(zhuǎn)換器的電感紋波電流最大值就會(huì)出現(xiàn)。這可以通過(guò)數(shù)學(xué)方式來(lái)表示,即設(shè)置紋波電流相對(duì)于D的導(dǎo)數(shù)(切線的斜率)等于零,并對(duì)D求解。簡(jiǎn)單起見(jiàn),假定轉(zhuǎn)換器能效為100%。


CCM工作
為了選擇CCM升壓轉(zhuǎn)換器的電感值(L),需要選擇最高KRF值,確保整個(gè)輸入電壓范圍內(nèi)都能夠以CCM工作,并避免峰值電流受MOSFET、二極管和輸出電容影響。 然后計(jì)算得出最小電感值。KRF 最高值通常選在0.3和0.6之間,但對(duì)于CCM可以高達(dá)2.0。 如前所述,當(dāng)D = 0.5時(shí),出現(xiàn)紋波電流ΔIL最大值。那么,多少占空比的情況下會(huì)出現(xiàn)KRF最大值呢? 我們可以通過(guò)派生方法來(lái)求得。


對(duì)于CCM工作,最小電感值(LMIN)應(yīng)在最接近? VOUT的實(shí)際工作輸入電壓(VIN(CCM))下進(jìn)行計(jì)算。根據(jù)應(yīng)用的具體輸入電壓范圍,VIN(CCM)可能出現(xiàn)在最小VIN、最大VIN、或其間的某個(gè)位置。解方程(5)求L,并根據(jù)VIN(CCM)下的KRF重新計(jì)算,可得出

DCM工作
如圖5所示,在一定工作VIN和輸出電流(IOUT)下的電感值小于LCRIT時(shí),DCM模式工作保持不變。對(duì)于DCM轉(zhuǎn)換器,可選擇最短的空閑時(shí)間以確保整個(gè)輸入電壓范圍內(nèi)均為DCM工作。tidle最小值通常為開關(guān)周期的3%-5%,但可能會(huì)更長(zhǎng),代價(jià)是器件峰值電流升高。然后采用tidle最小值來(lái)計(jì)算最大電感值(LMAX)。 LMAX必須低于VIN范圍內(nèi)的最低LCRIT。對(duì)于給定的VIN,電感值等于LCRIT(tidle= 0)時(shí)引發(fā)CrCM。

為計(jì)算所選最小空閑時(shí)間(tidle(min))的LMAX,首先使用DCM伏秒平衡方程求出tON(max)(所允許的MOSFET導(dǎo)通時(shí)間最大值)與VIN的函數(shù),其中tdis為電感放電時(shí)間。

平均(直流)電感電流等于轉(zhuǎn)換器直流輸入電流,通過(guò)重新排列(17),可得出tdis相對(duì)于tON的函數(shù)。簡(jiǎn)單起見(jiàn),我們將再次假設(shè)PIN = POUT。

LMAX遵循類似于LCRIT 的曲線,且同在VIN = ?VOUT時(shí)達(dá)到峰值。為確保最小tidle,要計(jì)算與此工作點(diǎn)相反的實(shí)際工作輸入電壓(VIN(DCM))下的最低LMAX值。根據(jù)應(yīng)用的實(shí)際輸入電壓范圍,VIN(DCM)將等于最小或最大工作VIN。若整體輸入電壓范圍高于或低于? VOUT(含? VOUT),則VIN(DCM)是距? VOUT最遠(yuǎn)的輸入電壓。若輸入電壓范圍覆蓋到了? VOUT,則在最小和最大VIN處計(jì)算電感,并選擇較低(最差情況下)的電感值?;蛘?,以圖表方式對(duì)VIN進(jìn)行評(píng)估,以確定最差情況。
輸入電壓模式邊界
當(dāng)升壓轉(zhuǎn)換器的輸出電流小于ICRIT與VIN的最大值時(shí),如果輸入電壓增加到高于上限模式邊界或下降到低于下限模式邊界,即IOUT大于ICRIT時(shí),則將引發(fā)CCM工作。而DCM工作則發(fā)生于兩個(gè)VIN的模式邊界之間,即IOUT小于ICRIT時(shí)。要想以圖表方式呈現(xiàn)VIN下的這些導(dǎo)通模式邊界,在相同圖表中繪制臨界負(fù)載(使用所選電感器)與輸入電壓和相關(guān)輸出電流的變化曲線。然后在X軸上找到與兩條曲線相交的兩個(gè)VIN值(圖6)。

要想以代數(shù)方式呈現(xiàn)VIN的模式邊界,首先將臨界負(fù)載的表達(dá)式設(shè)置為等于相關(guān)輸出電流,以查找交點(diǎn):

我們知道

模式邊界 – 設(shè)計(jì)示例
我們假設(shè)一個(gè)具有以下規(guī)格的DCM升壓轉(zhuǎn)換器:


忽略偽解(-3.36 V),我們?cè)?.95 V和10.40 V得到兩個(gè)輸入電壓模式邊界。這些計(jì)算值與圖7所示的交點(diǎn)相符。

采用WebDesigner? Boost Powertrain加速設(shè)計(jì)
對(duì)于不同的升壓電感值,手動(dòng)重復(fù)進(jìn)行這些設(shè)計(jì)計(jì)算可能會(huì)令人厭煩且耗費(fèi)時(shí)間。復(fù)雜的三次方程也使輸入電壓模式邊界的計(jì)算相當(dāng)繁瑣且容易出錯(cuò)。通過(guò)使用安森美半導(dǎo)體的WebDesigner?等在線設(shè)計(jì)工具,就能更輕松并顯著地加速設(shè)計(jì)工作。 Boost Powertrain設(shè)計(jì)模塊(圖8)會(huì)自動(dòng)執(zhí)行所有這些計(jì)算(包括實(shí)際能效的影響),并根據(jù)您的應(yīng)用要求推薦最佳電感值。您可以從廣泛的內(nèi)置數(shù)據(jù)庫(kù)中選擇真正的電感器部件值,或者輸入您自己的定制電感器規(guī)格,立即就能計(jì)算得出紋波電流和模式邊界、及其對(duì)輸出電容、MOSFET、二極管損耗、以及整體能效的影響。

結(jié)論
電感值會(huì)影響升壓轉(zhuǎn)換器的諸多方面,若選擇不當(dāng),可能會(huì)導(dǎo)致成本過(guò)高、尺寸過(guò)大、或性能不佳。通過(guò)了解電感值、紋波電流、占空比和導(dǎo)通模式之間的關(guān)系,設(shè)計(jì)人員就能夠確保輸入電壓范圍內(nèi)的所需性能。
參考文獻(xiàn)
[1]H. W. Turnbull, Theory of Equations, Chapter IX, Edinburgh & London: Oliver and Boyd, 1952.
[2]I. J. Zucker, "The cubic equation - a new look at the irreducible case," The Mathematical Gazette, vol. 92, no. 524, pp. 264-268, July 2008.
推薦閱讀:



